
martes, 8 de septiembre de 2009
tipos de raizes
Las raices se clasifican por su forma y por su situacion.
Por su forma pueden ser:
_pivotantes. Ej.: zanahoria
_fasciculadas. Ej. trigo, y
_Tuberosas.Ej.: Yuca, remolacha zanahoria, etc.
Por su sitaucion pueden ser:
_Subterraneas, acuaticas, y aereas; segun esten en la tierra, en el agua o en el aire,
_Raices adventicias son las que nacen del tallo o de las ramas. Sirven a la planta para adherirse y para reproducirse. Ej.: la raiz de la hiedra, fresal etc.
sábado, 29 de agosto de 2009
| Nro | Apellidos y Nombres | Colegio | Nota | Observacion |
|---|---|---|---|---|
| 1 | FLORES-SOLIS-EDGAR JANSER | INCA GARCILASO DE LA VEGA (CUSCO) | 17.25 | INGRESANTE |
| 2 | CASAVERDE-LÓPEZ-ALVARO CIRO | PARTICULARES (OTROS) | 15.7 | INGRESANTE |
| 3 | UNDA-ESCOBEDO-CESAR | NACIONALES (OTROS) | 11.65 | INGRESANTE |
| 4 | SALGADO-TACURI-ALEXIS | NACIONALES (OTROS) | 11.35 | INGRESANTE |
| 5 | USCAMAITA-PACHECO-EVER YHONATAN | URIEL GARCÍA (CUSCO) | 10.85 | INGRESANTE |
| 6 | APAZA-AMAU-CARLOS | URIEL GARCÍA (CUSCO) | 10.55 | INGRESANTE |
| 7 | BUSTAMANTE-CHIHUANTITO-JULIO CESAR | ANTONIO RAYMONDI (CUSCO) | 10.35 | INGRESANTE |
| 8 | MENDOZA-BEJAR-YOHANA VERIOSKA | EDUCANDAS (CUSCO) | 10.15 | INGRESANTE |
| 9 | YUCRA-PAUCAR-BERTHA | CLORINDA MATTO DE TURNER (CUSCO) | 10.15 | INGRESANTE |
| 10 | TERAN-CORREDOR-JESUS MANUEL | SAN JOSÉ OBRERO (ACOMAYO) | 9.9 | INGRESANTE |
| 11 | HUAMÁN-PEÑA-KATIA | PARTICULARES (OTROS) | 9.85 | INGRESANTE |
| 12 | RIMACHE-SUAREZ-WILSON | DANIEL ALCIDES CARRIÓN (CHUMBIVILCAS) | 9.8 | INGRESANTE |
| 13 | HUANCA-QUISPE-YERSON FREDY | NACIONALES (OTROS) | 9.55 | INGRESANTE |
| 14 | MAMANI-CRISPIN-ISAI ISAAC | TEC.AGROP.V.R.HAYA DE T. (CANCHIS) | 9.5 | INGRESANTE |
| 15 | MAMANI-RIVERA-ALBERTO | ALEJANDRO VELASCO ASTETE (CUSCO) | 9.4 | INGRESANTE |
| 16 | QUISPE-HUAMAN-JORGE FLORENTINO | PARTICULARES (OTROS) | 9.4 | INGRESANTE |
| 17 | HUAMAN-CASAFRANCA-BROTHYAM | LA SALLE (ABANCAY) | 9.35 | INGRESANTE |
| 18 | HUAMAN-PUMASUPA-CRISTIAN | AGUSTÍN GAMARRA (ANTA) | 9.35 | INGRESANTE |
| 19 | OLARTE-CHULLO-ALBHERT EDISON | ADVENTISTA (ESPINAR) | 9.2 | INGRESANTE |
| 20 | AMAO-ALVAREZ-JAMES NILTON | CIENCIAS (CUSCO) | 9.05 | INGRESANTE |
| 21 | PEREZ-FERNANDEZ-EMANUEL | NACIONALES (OTROS) | 9.05 | INGRESANTE |
| 22 | SUCSA-HUAMAN-BRANNDHI | CIENCIAS (CUSCO) | 9.05 | INGRESANTE |
| 23 | CARRION-MEDRANO-HECTOR DAVID | PUKLLASUNCHIS (CUSCO) | 9 | INGRESANTE |
| 24 | COA-LIMASCA-RODOL HARRY | INCA GARCILASO DE LA VEGA (CUSCO) | 9 | INGRESANTE |
| 25 | ROJAS-BENITES-MAXIMO | JUAN ESPINOZA MEDRANO (ANDAHUAYLAS) | 8.9 | |
| 26 | ROMAN-CRUZ-LUIS ALBERTO | SAN ANTONIO ABAD (CUSCO) | 8.85 | |
| 27 | CHAVEZ-LLANCAY-MONICA ALEXANDRA | EDUCANDAS (CUSCO) | 8.75 | |
| 28 | PACHECO-URQUIZO-BRIAN PAOLO | SAN FRANCISCO DE ASIS (CUSCO) | 8.7 | |
| 29 | CHUQUITAPA-CHALLCO-EDER ROMARIO | INCA GARCILASO DE LA VEGA (CUSCO) | 8.65 | |
| 30 | NAHUAMEL-SARCE-JHON ANDER | MANCO II (LA CONVENCION) | 8.6 | |
| 31 | MASIAS-HUAMAN-EDWARD SANTOS | DIDASKALIO NTA.SRA ROSARIO (URUBAMBA) | 8.35 | |
| 32 | ORMACHEA-ALMARAS-JOSE | NUESTRA SEÑORA DEL CARMEN (QUISPICANCHIS) | 8.25 | |
| 33 | HUAMAN-MAMANI-MONICA | EDUCANDAS (CUSCO) | 8.2 | |
| 34 | SERRANO-VARGAS-RODRIGO | SAN FRANCISCO DE ASIS (CUSCO) | 8.2 | |
| 35 | FUENTES-CHOQUE-BILLY GRAHAN | CORONEL PEDRO RUIZ GALLO (ESPINAR) | 8.15 | |
| 36 | CONDORI-OCHOA-OSCAR YONATAN | DIEGO QUISPE TITO (CUSCO) | 8.1 | |
| 37 | MAMANI-TICONA-FRANCO STEV | NACIONALES (OTROS) | 8.1 | |
| 38 | PACCO-QUISPE-DEIVI | SAN JUAN BAUTISTA (CALCA) | 8.05 | |
| 39 | GOMEZ-MAIHUA-RODRIGO LINDER | TOMASA TTITO CONDEMAYTA. (ACOMAYO) | 8 | |
| 40 | GARCIA-GALINDO-ARTURO | SALESIANOS (CUSCO) | 7.95 | |
| 41 | CUBA-CASTRO-CRISTIAN | SANTA URSULA (CUSCO) | 7.9 | |
| 42 | DUEÑAS-ALVAREZ-JUAN CARLOS | PARTICULARES (OTROS) | 7.9 | |
| 43 | OJEDA-CHULLA-HAMMER LOU | CIENCIAS (CUSCO) | 7.9 | |
| 44 | ATAUSINCHI-CHUQUITAPA-CARLOS EDUARDO | SAN FRANCISCO DE ASIS (CUSCO) | 7.85 | |
| 45 | DUEÑAS-SANCHEZ-RUSVEL JESUS | NACIONALES (OTROS) | 7.85 | |
| 46 | HUAMAN-CRUZ-GREGORI VICENTE | MIGUEL GRAU (ABANCAY) | 7.85 | |
| 47 | ORE-YUPANQUI-BRIAN CEDRIC | COLEGIO NO ESCOLARIZADO ANDRES BELLO (CUSCO) | 7.85 | |
| 48 | RAMÌREZ-MONZÒN-KAROL LEONEL | PARTICULARES (OTROS) | 7.85 | |
| 49 | MONTALVO-CHECYA-TKAQUISI | DIEGO QUISPE TITO (CUSCO) | 7.8 | |
| 50 | NINA-CRUZ-JOSE CARLOS | MATEO PUMACACHUA (CANCHIS) | 7.8 | |
| 51 | QUISPE-HUARACHA-ALEXANDER VICENTE | INCA GARCILASO DE LA VEGA (CUSCO) | 7.8 | |
| 52 | CAHUANA-SURQUISLLA-MARILSA | JOSÉ CARLOS MARIATEGUI (ANTABAMBA) | 7.75 | |
| 53 | HUANCA-HUAMANI-EBERT ROLANDO | INCA GARCILASO DE LA VEGA (CUSCO) | 7.75 | |
| 54 | ERGUETA-HUANCA-JORGE EDISON | SAN FRANCISCO DE ASIS (CUSCO) | 7.6 | |
| 55 | SOCUALAYA-MOLINA-ANGEL IVAN | SAN FRANCISCO DE ASIS (CUSCO) | 7.6 | |
| 56 | TRELLES-FLORES-JESUS DAVID | INCA GARCILASO DE LA VEGA (CUSCO) | 7.6 | |
| 57 | CARRASCO-CASTRO-GIANCARLO | NACIONALES (OTROS) | 7.55 | |
| 58 | ARIZABAL-VERA-JOSUE ABNER | SALESIANOS (CUSCO) | 7.5 | |
| 59 | CALLAÑAUPA-QUILLAHUAMAN-KAREN KIOKO | SANTA ROSA DE LIMA (CUSCO) | 7.5 | |
| 60 | CHOQQUE-CHAMPI-ERIK HAMMER | MIGUEL GRAU SEMINARIO (CUSCO) | 7.4 | |
| 61 | QUISPE-SONCCO-JOSE ANGEL | JOSE.GAB.COND. TUPAC AMARU. II (CANAS) | 7.4 | |
| 62 | HUANCACHOQUE-MAMANI-LENIN ERIK | MATEO PUMACACHUA (CANCHIS) | 7.35 | |
| 63 | CHOQUE-PALOMINO-JULIO | INCA RIPAQ (CUSCO) | 7.15 | |
| 64 | CJUIRO-PAZ-KATHERIN LUCY | EDUCANDAS (CUSCO) | 7.15 | |
| 65 | HUILLCA-POCCORI-FRANK EDWIN | ARTURO PALOMINO RODRÍGUEZ. (CUSCO) | 7.15 | |
| 66 | CUNO-ARELLANO-JHON CIRO | URIEL GARCÍA (CUSCO) | 7.1 | |
| 67 | MAMANI-CHURA-ROBERTO | NACIONALES (OTROS) | 7.1 | |
| 68 | ALATA-SEQUEIROS-JOHAN ALI | HUMBERTO VIDAL UNDA (CUSCO) | 7.05 | |
| 69 | ANDIA-CASTRO-ELVIS CRISTOFER | PARTICULARES (OTROS) | 7.05 | |
| 70 | GUTIERREZ-AMACHI-JUAN CARLOS | NACIONALES (OTROS) | 7 | |
| 71 | ZAVALA-MADERA-SAMUEL | JOSÉ PARDO (CUSCO) | 6.9 | |
| 72 | PICCARD-NUÑEZ-HERBERT PAUL | SAN ANTONIO ABAD (CUSCO) | 6.85 | |
| 73 | MEJIA-PINTO-ABEL | INCA GARCILASO DE LA VEGA (CUSCO) | 6.8 | |
| 74 | MUÑOZ-YABAR-FRANKLIN | URIEL GARCÍA (CUSCO) | 6.8 | |
| 75 | QUISPE-JORDAN-JHON CRISTIAN | SAN FCO. DE BORJA 51015 (CUSCO) | 6.8 | |
| 76 | TACO-CASILLA-RUBEN DARIO | MARIANO SANTOS (QUISPICANCHIS) | 6.75 | |
| 77 | HUARI-HUAMAN-EDISON VENTURO | ILLARY (ANTA) | 6.7 | |
| 78 | OXA-PUMACCAHUA-JHON CRISTIAN | PARTICULARES (OTROS) | 6.65 | |
| 79 | ALEJO-BUENO-ALVARO BRETT | DIDASCALIO SANTA MARÍA MADRE DE DIOS(CUSCO) | 6.55 | |
| 80 | ESCALANTE-FRISANCHO-KENJHY IVAN | URIEL GARCÍA (CUSCO) | 6.5 | |
| 81 | HUAYTA-PINO-CARLOS FERNANDO | PARTICULARES (OTROS) | 6.5 | |
| 82 | OCAMPO-MARIN-JHOSH CRISTIAN | CHALLHUAHUACHO (COTABAMBAS) | 6.5 | |
| 83 | SUTTA-QUISPE-LUIS EDUARDO | DIDASCALIO SANTA MARÍA MADRE DE DIOS(CUSCO) | 6.45 | |
| 84 | TAPIA-BERNEDO-JOSE CARLOS | ARTURO PALOMINO RODRÍGUEZ. (CUSCO) | 6.4 | |
| 85 | CHAMPI-ROMERO-LUZ ELENA | CLORINDA MATTO DE TURNER (CUSCO) | 6.35 | |
| 86 | ARAOZ-FLORES-ARNOLD FRANCIS | DIDASCALIO SANTA MARÍA MADRE DE DIOS(CUSCO) | 6.3 | |
| 87 | LOAYZA-MENDOZA-ROSA LUZ | PACHACONAS (ANTABAMBA) | 6.3 | |
| 88 | QUISPE-HUAMANI-AYDE | NACIONALES (OTROS) | 6.3 | |
| 89 | CASTRO-MEZA-LUIS ENRIQUE | NACIONALES (OTROS) | 6.25 | |
| 90 | SOSAYA-HUILLCA-EFREN CIRO | INMACULADA CONCEPCIÓN (CUSCO) | 6.25 | |
| 91 | CCORIMANYA-ESPINOZA-ROXANA | MANCO II (LA CONVENCION) | 6.2 | |
| 92 | CHECCORI-HUAMANI-YONATHAN CESAR | MATEO PUMACACHUA (CANCHIS) | 6.2 | |
| 93 | DUEÑAS-OLARTE-JESUS RAPHAEL | INCA GARCILASO DE LA VEGA (CUSCO) | 6.2 | |
| 94 | BERRIOS-VILLASANTE-RAQUEL MELISSA | JOSÉ CARLOS MARIATEGUI (MANU) | 6.15 | |
| 95 | COAQUIRA-QUISPE-ANA ABIGAIL | JOSÉ PARDO (CUSCO) | 6.15 | |
| 96 | QUISPE-HUMPIRI-LUZ MERY | MIGUEL GRAU SEMINARIO (CUSCO) | 6.15 | |
| 97 | SANCHEZ-ALARCÓN-LAURA CAROLINA | PARTICULARES (OTROS) | 6.15 | |
| 98 | AEDO-CCANA-NELSON SAUL | URIEL GARCÍA (CUSCO) | 6.1 | |
| 99 | MARTINEZ-MUÑIZ-JUNIOR JHEREMY | LA CONVENCIÓN (LA CONVENCION) | 6.05 | |
| 100 | RODRIGUEZ-TICONA-VICTOR MAGNO | NACIONALES (OTROS) | 6 | |
| 101 | CONDE-SAIRE-DARWIN | INCA GARCILASO DE LA VEGA (CUSCO) | 5.95 | |
| 102 | OROCHE-SOTO-MICHAEL ALEX | MATEO PUMACACHUA (CANCHIS) | 5.95 | |
| 103 | PAREJA-ZAVALA-RONY RAUL | NACIONALES (OTROS) | 5.95 | |
| 104 | QUISPE-CONDE-MIGUEL ANGEL | INMACULADA CONCEPCIÓN (CANCHIS) | 5.95 | |
| 105 | YEPEZ-MAQUERA-CARLA FERNANDA | EDUCANDAS (CUSCO) | 5.9 | |
| 106 | YUPANQUI-AQUINO-JHENNER ELVIN | MARIANO SANTOS (QUISPICANCHIS) | 5.9 | |
| 107 | CHALCO-CARRASCO-DENNIS ERICK | PARTICULARES (OTROS) | 5.85 | |
| 108 | MACHACA-QUISPE-LUCERO BETZABE | URIEL GARCÍA (CUSCO) | 5.85 | |
| 109 | CHAVEZ-CALDERON-FELIPE NICOLAI | NACIONALES (OTROS) | 5.8 | |
| 110 | HANCO-CORIMANYA-WILSON | MATEO PUMACACHUA (CANCHIS) | 5.75 | |
| 111 | QUISPE-ATAUCURI-EDUARDO | CIENCIAS (CUSCO) | 5.7 | |
| 112 | CAYLLAHUA-AIVAR-REIMER AMERICO | LA SALLE (ABANCAY) | 5.65 | |
| 113 | CONDORI-INQUILTUPA-REMI RONALD | ROMERITOS 51014 (CUSCO) | 5.6 | |
| 114 | MORALES-VILLENA-HELEN LINDA | PARTICULARES (OTROS) | 5.6 | |
| 115 | QUIÑA-MENACHO-FRINE | LA MERCED (CHUMBIVILCAS) | 5.6 | |
| 116 | CAMAZA-CASTRO-JIMMY EDWARD | INCA GARCILASO DE LA VEGA (CUSCO) | 5.5 | |
| 117 | RIOS-DIAZ-EDGAR | NACIONALES (OTROS) | 5.5 | |
| 118 | LOPINTA-CONDORI-JUAN CARLOS | J.A.P.A.M. (CANCHIS) | 5.45 | |
| 119 | MENDOZA-SALAS-BRIGITTE ELICENTA | INMACULADA CONCEPCIÓN (CANCHIS) | 5.45 | |
| 120 | OSNAYO-CAÑIHUA-YURI EFRAIN | NACIONALES (OTROS) | 5.45 | |
| 121 | CHOQUEHUILLCA-CORDOVA-SAHITO GEN | SAN JUAN DE DIOS | 5.35 | |
| 122 | CISNEROS-QUINTASI-EDGARD FERNANDO | INMACULADA CONCEPCIÓN (CANCHIS) | 5.35 | |
| 123 | ESTRADA-LOPEZ-JONATHAN JAVIER | SOR ANA DE LOS ANGELES (CUSCO) | 5.35 | |
| 124 | GONZALES-VARGAS-EDIZON | PARTICULARES (OTROS) | 5.35 | |
| 125 | AYRAMPO-ARRIAGA-ALDO | CIENCIAS (CUSCO) | 5.3 | |
| 126 | CALDERÓN-TÍO-JUAN WILL | URIEL GARCÍA (CUSCO) | 5.3 | |
| 127 | TTITO-CCORI-MICHEL SANDRO | LUIS VALLEJOS SANTONI 50002 (CUSCO) | 5.3 | |
| 128 | DAVALOS-TORBISCO-MILAGROS MELIZA | PARTICULARES (OTROS) | 5.25 | |
| 129 | HUAMANI-MARTINEZ-MARY CARMEN | NUESTRA SEÑORA DEL ROSARIO (ABANCAY) | 5.25 | |
| 130 | TRINIDAD-GUILLEN-GERMAN | MANCO II (LA CONVENCION) | 5.25 | |
| 131 | ZARATE-PANTIGOSO-ELIZABETH | CLORINDA MATTO DE TURNER (CUSCO) | 5.25 | |
| 132 | CAHUA-ARAGON-SAMIER | ILLARY (ANTA) | 5.2 | |
| 133 | PARDO-MITMA-ELEUTERIO | NACIONALES (OTROS) | 5.2 | |
| 134 | URIBE-ARIAS-JUAN CARLOS | NACIONALES (OTROS) | 5.2 | |
| 135 | MISME-GONZALES-ORESTES | INCA GARCILASO DE LA VEGA (CUSCO) | 5.15 | |
| 136 | SERRANO-COYORI-KEVIN | NACIONALES (OTROS) | 5.15 | |
| 137 | CANA-SÁNCHEZ-LUIS ARMANDO | NACIONALES (OTROS) | 5.05 | |
| 138 | QUISPE-DAVILA-ANA ANGELICA | EL CARMELO (CUSCO) | 5.05 | |
| 139 | CAHUANTICO-HUALLPA-JHONATAN | NACIONALES (OTROS) | 5 | |
| 140 | HUAMAN-ORTEGA-ALEX | GENERAL OLLANTA (URUBAMBA) | 5 | |
| 141 | MERCADO-LEON-JOHANN | URIEL GARCÍA (CUSCO) | 5 | |
| 142 | TAPIA-MARURI-EMPERATRIZ | SAN FCO. DE BORJA 51015 (CUSCO) | 5 | |
| 143 | LLANTERHUAY-GAMARRA-CRISTIAN | FRANCISCO BOLOGNESI (ABANCAY) | 4.95 | |
| 144 | HUAHUATICO-CCOLQUE-HERMELINDA | EMANCIPACIÓN AMERICANA (CANCHIS) | 4.9 | |
| 145 | HUANCA-NINA-JULIO CESAR | NACIONALES (OTROS) | 4.9 | |
| 146 | LAROTA-CHURA-HENRRY DARIO | HUMBERTO VIDAL UNDA (CUSCO) | 4.9 | |
| 147 | ARQQUE-CONDORI-PETER ALEX | LIBERTADORES DE AMÉRICA (CANCHIS) | 4.85 | |
| 148 | ARAPA-VERA-FRANKLIN VLADIMIR | PARTICULARES (OTROS) | 4.75 | |
| 149 | QUISPE-RIMACHI-TONY RIDER | URIEL GARCÍA (CUSCO) | 4.75 | |
| 150 | RODRIGUEZ-VIVERO-ANGEL ARNALDO | NACIONALES (OTROS) | 4.75 | |
| 151 | VARGAS-ZEGARRA-MELVIN EDGARDO | URIEL GARCÍA (CUSCO) | 4.75 | |
| 152 | MERMA-CANO-KENY ORLANDO | INCA GARCILASO DE LA VEGA (CUSCO) | 4.7 | |
| 153 | PFURO-HUAMAN-ELVIS ROYER | NUESTRA SEÑORA DE BELÉN (CALCA) | 4.7 | |
| 154 | PUMA-CONDORI-HENRY RICHARD | PARTICULARES (OTROS) | 4.7 | |
| 155 | AIMITUMA-DELGADO-ANGIE KHAREN | LA INMACULADA (LA CONVENCION) | 4.6 | |
| 156 | SANTA CRUZ-HUALLPARIMACHI-JOHEL | SAGRADO CORAZÓN DE JESÚS (ANTA) | 4.6 | |
| 157 | CHAUCCA-RAMOS-HAROLD MICHAEL | KISHUARA (ANDAHUAYLAS) | 4.55 | |
| 158 | CUBA-SERRANO-RAMON | AGUSTÍN DE ALAMO (CALCA) | 4.55 | |
| 159 | IMQUILTUPA-QUISPE-MIJAEL | CIENCIAS (CUSCO) | 4.55 | |
| 160 | ALARCON-HUANACO-EDWIN MIJAIL | J.A.P.A.M. (CANCHIS) | 4.5 | |
| 161 | CCACYAHUILLCA-VELASCO-MIGUEL ANGEL | HUMBERTO LUNA (CUSCO) | 4.5 | |
| 162 | GORDILLO-DONDERO-LUIS ADOLFO | NACIONALES (OTROS) | 4.5 | |
| 163 | SERRANO-BEJAR-GIAN CARLO | LA CONVENCIÓN (LA CONVENCION) | 4.45 | |
| 164 | MAMANI-NUÑEZ-ERICA MARCIA | NACIONALES (OTROS) | 4.4 | |
| 165 | ORE-YUPANQUI-CEDRIC MARK | INCA GARCILASO DE LA VEGA (CUSCO) | 4.4 | |
| 166 | ARIAS-LOVATON-DIANE CAROLINE | SANTA ANA (CUSCO) | 4.35 | |
| 167 | BEJAR-DINOS-JOAN MANUEL | INCA GARCILASO DE LA VEGA (CUSCO) | 4.35 | |
| 168 | ARCE-QUISPE-YENNY ELIZABETH | CLORINDA MATTO DE TURNER (CUSCO) | 4.3 | |
| 169 | CAYLLAHUA-VARGAS-JHONNATAN ERICK | EL AMAUTA (CANCHIS) | 4.2 | |
| 170 | RODRIGUEZ-RODRIGUEZ-CARLOS ENMANUEL | NACIONALES (OTROS) | 4.2 | |
| 171 | SINGONA-PUMACCAHUA-AMILCAR | CIENCIAS (CUSCO) | 4.2 | |
| 172 | BACA-CONDORI-JOSSIMAR JORDANO | PARTICULARES (OTROS) | 4.15 | |
| 173 | CANAZA-CHOQUE-JOSE MANUEL | LA CONVENCIÓN (LA CONVENCION) | 4.05 | |
| 174 | SULLCA-AMATA-YULISSA | NACIONALES (OTROS) | 4.05 | |
| 175 | PIMENTEL-CRUZ-JIMMY | LA CONVENCIÓN (LA CONVENCION) | 4 | |
| 176 | CCACYAVILCA-SANDOVAL-NICO | LIBERTADORES DE AMÉRICA (ACOMAYO) | 3.95 | |
| 177 | SANA-QUISPE-ROLANDO | SAGRADO CORAZÓN DE JESÚS (CUSCO) | 3.95 | |
| 178 | QUISPE-MESICANO-ROGER | MARIANO SANTOS (QUISPICANCHIS) | 3.85 | |
| 179 | HUARACA-LLANOS-ELI CESAR | NACIONALES (OTROS) | 3.8 | |
| 180 | COLQUE-BELLIDO-HILDA | NACIONALES (OTROS) | 3.7 | |
| 181 | CUEVA-GUEVARA-YAIR GERSON | NUESTRA SEÑORA DE BELÉN (CALCA) | 3.7 | |
| 182 | MACHACA-ALVAREZ-LUIS YORDANO | NACIONALES (OTROS) | 3.6 | |
| 183 | DELGADO-BOZA-ARNOLD DONALD | NACIONALES (OTROS) | 3.5 | |
| 184 | GUTIERREZ-HUANCA-NELLY | NACIONALES (OTROS) | 3.35 | |
| 185 | APARICIO-RIVAS-ALEXANDER | CIENCIAS (CUSCO) | 3.25 | |
| 186 | MORVELI-GAMARRA-RUTH SILVIA | URIEL GARCÍA (LA CONVENCION) | 3.25 | |
| 187 | PUMA-PIMENTEL-DIEGO GUILLERMO | ARTURO PALOMINO RODRÍGUEZ. (CUSCO) | 3.1 | |
| 188 | NOA-LATORRE-LENIN RUSO | MONTE SALVADO (CALCA) | 2.4 | |



1ro de enero
María Madre de Dios
 La Iglesia Católica quiere comenzar el año pidiendo la protección de la Santísima Virgen María. La fiesta mariana más antigua que se conoce en Occidente es la de "María Madre de Dios". Ya en las Catacumbas o antiquísimos subterráneos que están cavados debajo de la ciudad de Roma y donde se reunían los primeros cristianos para celebrar la Misa, en tiempos de las persecuciones, hay pinturas con este nombre: "María, Madre de Dios".
La Iglesia Católica quiere comenzar el año pidiendo la protección de la Santísima Virgen María. La fiesta mariana más antigua que se conoce en Occidente es la de "María Madre de Dios". Ya en las Catacumbas o antiquísimos subterráneos que están cavados debajo de la ciudad de Roma y donde se reunían los primeros cristianos para celebrar la Misa, en tiempos de las persecuciones, hay pinturas con este nombre: "María, Madre de Dios".
Si nosotros hubiéramos podido formar a nuestra madre, ¿qué cualidades no le habríamos dado? Pues Cristo, que es Dios, sí formó a su propia madre. Y ya podemos imaginar que la dotó de las mejores cualidades que una criatura humana puede tener.
Pero, ¿es que Dios ha tenido principio? No. Dios nunca tuvo principio, y la Virgen no formó a Dios. Pero Ella es Madre de uno que es Dios, y por eso es Madre de Dios.
Y qué hermoso repetir lo que decía San Estanislao: "La Madre de Dios es también madre mía". Quien nos dio a su Madre santísima como madre nuestra, en la cruz al decir al discípulo que nos representaba a nosotros: "He ahí a tu madre", ¿será capaz de negarnos algún favor si se lo pedimos en nombre de la Madre Santísima?
 Al saber que nuestra Madre Celestial es también Madre de Dios, sentimos brotar en nuestro corazón una gran confianza hacia Ella.
Al saber que nuestra Madre Celestial es también Madre de Dios, sentimos brotar en nuestro corazón una gran confianza hacia Ella.
Cuando en el año 431 el hereje Nestorio se atrevió a decir que María no era Madre de Dios, se reunieron los 200 obispos del mundo en Éfeso (la ciudad donde la Santísima Virgen pasó sus últimos años) e iluminados por el Espíritu Santo declararon: "La Virgen María sí es Madre de Dios porque su Hijo, Cristo, es Dios". Y acompañados por todo el gentío de la ciudad que los rodeaba portando antorchas encendidas, hicieron una gran procesión cantando: "Santa María, Madre de Dios, ruega por nosotros pecadores ahora y en la hora de nuestra muerte. Amén".
El título "Madre de Dios" es el principal y el más importante de la Virgen María, y de él dependen todos los demás títulos y cualidades y privilegios que Ella tiene.
Los santos muy antiguos dicen que en Oriente y Occidente, el nombre más generalizado con el que los cristianos llamaban a la Virgen era el de "María, Madre de Dios".
domingo, 23 de agosto de 2009
Posteado por:
:: PC ::
ASPIRINE - Salud al máximo
LEAVEMEALONE - La policía te buscará menos
THUGSTOOLS - Todas las armas (1)
PROFESSIONALTOOLS - Todas las armas (2)
NUTTERTOOLS - Todas las armas (3)
PRECIOUSPROTECTION - Armadura al máximo
BIGBANG - Todos los coches explotan
IWANTITPAINTEDBLACK - Todos los coches se vuelven negros
AHAIRDRESSERSCAR - Todos los coches se vuelven rosas
PROGRAMMER - Tommy se vuelve delgado
ICANTTAKEITANYMORE - Suicidarse
FANNYMAGNET - Las mujeres te siguen
DEEPFRIEDMARSBARS - Tommy se vuelve gordo
CERTAINDEATH - Tommy fuma
MIAMITRAFFIC - Conductores agresivos
GREENLIGHT - Semáforos siempre verdes
SEAWAYS - Coches que flotan sobre el agua
COMEFLYWITHME - Coches que vuelan
LOADSOFLITTLETHINGS - Cambiar el tamaño de las ruedas
WHEELSAREALLINEED - Sólo las ruedas serán visibles
CHICKSWITHGUNS - Chicas en bikini armadas
NOBODYLIKESME - Los peatones nos detestan
OURGODGIVENRIGHTTOBEARARMS - Los peatones llevan armas
HOPINGIRL - Los peatones entran en tu vehículo
FIGHTFIGHTFIGHT - Pelea
GRIPISEVERYTHING - Conducción perfecta
LIFEISPASSINGMEBY - Acelerar el reloj
YOUWONTTAKEMEALIVE - La policía te buscará más
STILLLIKEDRESSINGUP - Cambias de ropa / personajes
CHEATSHAVEBEENCRACKED - Vestuario de Ricardo Díaz
LOOKLIKELANCE - Vestuario de Lance Vance
MYSONISALAWYER - Vestuario de Ken Rosenberg
LOOKLIKEHILARY - Vestuario de Hilary King
ONEARMEDBANDIT - Vestuario de Phil Cassidy
IDONTHAVETHEMONEYSONNY - Vestuario de Sonny Forelli
FOXYLITTLETHING - Vestuario de Mercedes
ROCKANDROLLMAN - Vestuario de uno de los miembros de Love First
WELOVEOURDICK - Vestuario de otro de los miembros de Love First
CANTSEEATHING - Cambia el tiempo a nublado
CATSANDDOGS - Cambia el tiempo a tormentoso
ALOVELYDAY - Cambia el tiempo a soleado
APLEASANTDAY - Cambia el tiempo a nuboso
GETTHEREFAST - Vehículo Sabre Turbo
PANZER - Conseguir un tanque
TRAVELINSTYLE - Vehículo Bloodring Banguer (1)
GETTHEREQUICKLY - Vehículo Bloodring Banguer (2)
GETTHEREVERYFASTINDEED - Vehículo Hotring Racer (1)
GETTHEREAMAZINGLYFAST - Vehículo Hotring Racer (2)
THELASTRIDE - Vehículo Corbillard
ROCKANDROLLCAR - Conseguir la limusina de los Love First
BETTERTHANWALKING - Vehículo Caddie
personajes
| | Diego de Almagro (Almagro ¿? 1463 - Cuzco 1538). Conquistador del Perú. Llegó a América junto a Pedro Arias Dávila en 1514. Conoció a Francisco Pizarro y juntó a él y Hernando de Luque formó una empresa para descubrir el reino del Birú. En una de sus expediciones perdió un ojo en una pelea con los indígenas de pueblo Quemado. No estuvo presente cuando Pizarro capturó al Inca Atahualpa pues llegó recién al Perú en 1533. Fue nombrado por Carlos I gobernador de Nueva Toledo. Tuvo que regresar de su expedición a territorio chileno en 1535 pues fue repelido por los araucanos. Sus diferencias con Pizarro lo llevaron a una guerra con el conquistador del Perú. Fue capturado en la Batalla de Salinas (1538) y sentenciado a la pena del garrote. Diego de Almagro el Mozo: (Panamá 1522 - Cuzco 1542) Nació en Panamá en 1522, hijo del conquistador Diego de Almagro y de una indígena bautizada como Ana Martínez. Se puede decir que fue el primer mestizo que detentó tanto poder desde la conquista del Tahuantinsuyo. Líder de los almagristas desde la muerte de su padre, participó en el asesinato de Francisco Pizarro. Fue derrotado por las tropas de Vaca de Castro en Chupas el 16 de setiembre de 1542. Fue sentenciado a muerte y enterrado junto a su padre, en el convento de La Merced. Alonso de Alvarado: (Burgos - Lima 1556) Caballero del hábito de Santiago, peleó contra las huestes de Quizo Yupanqui que asediaban Lima en 1536, contra Diego de Almagro en 1537 y en las Salinas en 1538. También combatió en Chupas y Jaquijahuana. Atahualpa (Cuzco ¿1500? - Cajamarca 1533): Inca. Llamado también Atabaliba por algunos cronistas, su nombre quechua significa "luchador victorioso". Hijo de Huayna Capac y de Tocto Coca, se cree que estuvo en Tumibamba cuando ocurrió el deceso de su padre. Destacó como jefe militar y tuvo el reconocimiento de la gente norteña, lo que motivó los celos de Huascar, el inca reconocido en el Cuzco. Ambos incas se enfrascaron en una sangrienta guerra en la que salió victorioso Atahualpa. Sin embargo este inca no pudo llegar al Cuzco a ceñirse la mascapaycha porque tuvo noticias de la llegada de los españoles. Sin oponer resistencia, Atahualpa fue apresado por la hueste de Francisco Pizarro el 16 de noviembre de 1532. Para conseguir su libertad, ofreció a los peninsulares una habitación llena de oro y dos de plata. Sin embargo, los españoles tuvieron miedo de algún levantamiento indígena por lo que apresuraron su ejecución. El último inca del Tahuantinsuyo murió el 29 de agosto de 1533. Francisco de Bobadilla: Provincial de los mercedarios en el Perú. Fue árbitro en las conversaciones entre Francisco Pizarro y Diego de Almagro en 1537, sobre las delimitaciones de Nueva Castilla y Nueva Toledo, favoreciendo a los Pizarro. Francisco de Carbajal: (Castilla la Vieja - Cuzco 1548) También conocido como "El Demonio de los Andes", llegó al Perú en auxilio de Francisco Pizarro ante el cerco de Lima por parte de Quizo Yupanqui. Vivió en Arequipa y luego en Cuzco. Participó en las batallas de Chupas, Añaquito, Huarina, se enfrentó a Diego Centeno y finalmente fue vencido en Jaquijahuana el 9 de abril de 1548. Fue ejecutado, acusado de haber asesinado a más de 300 españoles en sus batallas. Carlos I (Gante 1500 -Extremadura 1558). Rey de España. Hijo de Felipe I Habsburgo y de Juana de Castilla, fue nombrado Carlos I rey de España en 1516 y Carlos V rey del Sacro Imperio Romano Germánico en 1519. Su reino se extendió desde los Países Bajos, Austria, Sicilia, y Nápoles hasta Filipinas y gran parte de América. Abdicó a favor de su Hijo Felipe II en 1556. Bartolomé de Las Casas: (Sevilla 1474 - Madrid 1566) Primer sacerdote nombrado en América (1510) y conocido por su defensa de los indios, Bartolomé de las Casas fue primero un encomendero en Cuba. Su ardua campaña, dirigida siempre a los reyes de España, le valió se nombrado "protector de los indios" en 1516. Las Casas proponía la colonización pacífica a través de misioneros. Pudo aplicar sus teorías en Cumaná (Venezuela) con poco éxito. Siguió su labor protectora en varios lugares de América y fue una influencia en la promulgación de las Leyes Nuevas de 1542. En 1544 fue nombrado Obispo de Chiapas (México), luego de declinar el obispado del Cuzco. Escribió "Breuíssima relación de la destruyción de las Indias" (1552). Diego Centeno: (Ciudad Rodrigo 1514 - Chuquisaca 1549) Llegó en 1534 al Perú con Pedro de Alvarado. Combatió contra Diego de Almagro en el bando de Gonzalo Pizarro y contra Diego de Almagro el Mozo. Luego se levantó contra Gonzalo Pizarro, siendo vencido en agosto de 1546. Al poco tiempo tomó la ciudad del Cuzco, siendo vencido de nuevo por los pizarristas en Huarina el 20 de octubre de 1547. Se unió al ejército de Pedro de la Gasca, venciendo en Jaquijahuana. Pedro Cieza de León: (Llerena 1522 - Sevilla 1554) Uno de los principales cronistas del Perú y un incansable escritor. Siendo un joven en busca de aventura, se embarcó a América en junio de 1535. Paso por Santo Domingo, Panamá, Cartagena de Indias y Cali, donde escribió los sucesos más importantes que veía. Llegó al Perú en 1547 junto a Pedro de La Gasca y luchó contra Gonzalo Pizarro. Viajó al Collao y Puno en busca de información para sus crónicas, con apoyo de La Gasca. Regresó a Lima en 1550 a terminar su obra y a España en 1552. Fue en Sevilla que vio impresa la primera parte de su conocida obra Crónica del Perú. Las otras cuatro partes fueron publicadas después de su muerte. Cristóbal Colón (Génova 1446 - Valladolid 1506). Descubridor de América. Tras fallidos encuentros con los principales monarcas de Europa, Colón logró convencer a los Reyes Católicos de España de llegar a las indias a través de un viaje marino por occidente. Colón partió del puerto de Palos el 3 de agosto de 1492. Tras un agotador y difícil viaje llegó a la isla de Guanahaní o San Salvador el 12 de octubre del mismo año. Recorrió varias islas y regresó a España en 1493. Nombrado virrey de las tierras descubiertas realizó 3 viajes mas entre 1493 y 1502, descubriendo gran parte de las Antillas, el golfo del Darién y parte de América del Sur. La corona no le reconoció los pagos y recompensas por los servicios prestados. Colón murió el 20 de Mayo de 1506. Lope García de Castro (¿? - Madrid 1576). Gobernador del Perú. Ingresó a lima el 22 de setiembre de 1564 como gobernador, capitán general del Perú y presidente de la Real Audiencia. Durante los años que ejerció su cargo ordenó administrativamente el virreinato del Perú y dio muchas de las ordenanzas que luego serían aplicadas por el virrey Toledo. Entregó su gobierno en 1569 y murió en España en 1576. Inca Garcilaso de la Vega: (Cuzco 1539 - Córdoba 1616) Cronista mestizo, hijo de Sebastián Garcilaso de la Vega Vargas y la princesa incaica Palla Chimpu Ocllo. Desde pequeño bebió tanto de la vertiente andina como de la española, cosa que luego plasmaría en sus crónicas. En 1560 viaja a estudiar a España, donde intenta sin éxito que la Corona reconozca los servicios prestados por su padre. Vive en Montilla y en Córdoba, y nunca regresaría al Perú. En Córdoba fue donde escribiría sus conocidos libros, como La Florida del Inca y Los Comentarios Reales de los Incas, esta última publicada en Lisboa en 1609. Murió el 26 de abril de 1616. Pedro de la Gasca: (Caballería de Navarregadilla 1494 - Sigüenza 1565) Nombrado "Pacificador" y presidente de la Real Audiencia por Carlos V para debelar la rebelión de Gonzalo Pizarro. La Gasca estudió en las universidades de Salamanca y Alcalá, consiguiendo el título de Licenciado en Artes. Luego se alistó en el ejército en 1522. Partó de España en 1546 y derrotó a Gonzalo Pizarro en Jaquijahuana, luego de prometer amnistía y encomiendas a todos los de su bando. Con el virreinato pacificado, realizó una serie de obras administrativas y públicas. Se fue del Perú el 27 de enero de 1550. Jerónimo Guacrapáucar: Curaca de Jauja en 1536. Realizó un largo proceso para reconocer los privilegios de su cargo. Felipe Guamán Poma de Ayala: (San Cristóbal de Santuto - Lima 1615) Cronista mestizo, hijo de Martín Guamán Mallque y Curi Ocllo, hija del Inca Túpac Yupanqui. Se tienen pocos datos certeros de este cronista. Se cree que estudió en Cuzco y en Huamanga. Su obra, Nueva Corónica y Buen Gobierno resalta por sus dibujos conocidos mundialmente. Felipe II: (Valladolid 1527 - Madrid 1598) Rey de España (), hijo de Carlos V e Isabel de Portugal. Llegó a ser Rey de Nápoles y Sicilia en 1544, y de los Países Bajos en 1555. Mandó construir el Monasterio de El Escorial. Francisco Hernández Girón: (Cáceres de Extremadura - Lima 1554) Líder de la segunda guerra de los encomenderos. Llegó a América en 1535 y al Perú con el virrey Núñez Vela. Peleó contra Gonzalo Pizarro en Añaquito y Jaquijahuana. Se amotinó en el Cuzco el 12 de noviembre de 1553 a causa del reparto desigual de encomiendas, prometido por Pedro de la Gasca. Fue derrotado y ejecutado el 7 de diciembre de 1554. Andrés Hurtado de Mendoza: (Cuenca - Lima 1561) Segundo virrey del Perú, nombrado en marzo de 1555. Llegó a Lima el 26 de junio de 1556. Fundó la villa de Cañete (1556) y la ciudad de Cuenca (Ecuador). Logró someter a Sayri Túpac, segundo inca de Vilcabamba. Falleció el 30 de marzo de 1561. Hernando de Luque (¿? - Panamá 1534). Socio de la conquista del Perú. Llegó a América en 1514. Siempre estuvo presente como capellán en las entradas de los conquistadores. Se asoció a Francisco Pizarro y Diego de Almagro y tuvo activa participación en la preparación de la conquista del Perú. Por la capitulación de Toledo (1529) se le nombró obispo de Tumbes y protector de indios. Murió en la ciudad de Panamá en 1534 esperando la bula papal que le confería el cargo eclesiástico. Huayna Cápac (¿? - Tumibamba c.1524). Inca. Durante el reinado de este inca se produjo la mayor expansión del Tahuantinsuyo. Huayna Capac tuvo como centro de operaciones la ciudad de Tumibamba (Quito), ciudad que en poco tiempo se convirtió en el segundo punto administrativo más importante del Tahuantinsuyo. Huyana Capac y su hijo Ninan Coyuchi Murieron de viruela, enfermedad que devastó gran parte de la población indígena hacia 1524. Manco Inca (Cuzco 1515 - Vilcabamba 1545) Inca. Hijo de Huayna Capac, Manco Inca fue nombrado sucesor de Atahualpa por Francisco Pizarro para evitar problemas durante su establecimiento en el Perú. Rápidamente Manco Inca se da cuenta de que realmente no gobierna en lo absoluto, al contrario es un simple fantoche de los españoles quienes inclusive lo golpearon y lo encarcelaron. Tras persuadir a su celador, Manco Inca logró fugar y organizó la resistencia indígena. Sitió el Cuzco y tomó la fortaleza de Sacsayhuaman. La llegada de Almagro a Cuzco motivó la salida de Manco Inca, refugiándose en Vilcabamba. Desde esta ciudad organizo escaramuzas y atacó varios campamentos españoles. Murió asesinado tras una confusión en 1545. Vasco Nuñez de Balboa (¿? - Panamá 1517). Descubridor del mar del sur. Vasco Nuñez de Balboa descubrió el Mar del Sur u Océano Pacífico el 25 de setiembre de 1513 y en nombre del Rey Fernando y La reina Juana tomó posesión de los territorios centro americanos. Tras fuertes disputas con Pedro Arias Dávila murió decapitado en 1517. Blasco Núñez Vela: (Ávila - Añaquito 1546) Primer Virrey del Perú (1543-1546). De familia noble, fue corregidor de Málaga y Cuenca. Fue nombrado Virrey en abril de 1543, llegando a Lima el 17 de mayo de 1544, dispuesto a aplicar las Leyes Nuevas. Una serie de acciones violentas llevaron a que la Audiencia de Lima lo desterrara en setiembre de 1544. Desembarcó en Tumbes y organizó un ejército en contra del rebelde Gonzalo Pizarro, contra el cual perdió en Añaquito el 18 de enero de 1546. Murió ejecutado. Rodrigo Orgóñez: (Oropesa 1490? - Cuzco 1538) Teniente general de las tropas almagristas que pelearon en los campos de las Salinas (Cuzco) el 6 de abril de 1538. Amigo personal muy cercano a Almagro. Diego Ortiz: Misionero Agustino acusado de la muerte de Titu Cusi Yupanqui, tercer inca de Vilcabamba. Fue torturado y asesinado en 1570. Paullu: (1518 - 1549) Hermano menor de Manco Inca, acompañó a Almagro en su expedición a Chile en 1535. A su retorno, su hermano Manco se había rebelado, por lo que Paullu fue nombrado nuevo Inca en el Cuzco. Adoptó la cultura española y fue bautizado en 1545 bajo el nombre Melchor Carlos Inca. Vivió cómodamente en el Cuzco hasta el día de su muerte. Francisco Pizarro (Trujillo de Extremadura 1478 - Lima 1541). Conquistador del Perú. Tras varias expediciones en el "nuevo mundo", formó una empresa con sus socios Diego de Almagro y Hernando de Luque para descubrir los territorios al sur de Panamá conocidos como el reino del Birú. Realizó dos viajes exploratorios antes de regresar a España y firmar con la corona la Capitulación de Toledo (26 de julio de 1529). Prosiguió la conquista con los títulos de gobernador, adelantado y alguacil mayor de Nueva Castilla, nombre que inicialmente se le dio al Perú. Fue en su tercer viaje que llegó definitivamente al Perú y lo sometió rápidamente pues capturó al inca Atahualpa (16 de noviembre de 1532) y desintegró el Tahuantinsuyo. Fundo la capital del Reino del Perú, La ciudad de los Reyes el 18 de enero de 1535. Hizo frente a las rebeliones de Manco Inca y Diego de Almagro, y repartió encomiendas a los principales conquistadores que lo acompañaron en su travesía. La corona lo premió con el título de Marqués (10 de octubre de 1537) por las acciones realizadas en el Nuevo Mundo. Fue ultimado por facciones almagristas en su casa frente a la Plaza Mayor de Lima el 26 de junio de 1541. Gonzalo Pizarro: (Trujillo de Extremadura 1511 - Cuzco 1548) Hermano menor de los Pizarro, como conquistador participó en la captura de Atahualpa en Cajamarca. Luego luchó contra Diego de Almagro en 1538. Fue en busca del país de la Canela en 1540. Se levantó en contra del virrey Núñez Vela en 1544, y fue nombrado Gobernador y Capitán General del Perú. Trató de perpetuarse en el poder, pero fue vencido por La Gasca en la batalla de Jaquijahuana (9 de abril de 1548). Fue ejecutado en Cuzco. Hernando Pizarro: (Trujilo de Extremadura 1502 - Medina del Campo 1578) Hermano de Francisco Pizarro, como conquistador participó en la captura de Atahualpa en Cajamarca. En España fue nombrado Caballero de la Orden de Santiago. Combatió contra Diego de Almagro en la batalla de las Salinas en 1538, ejecutándolo después. Regresó a España y fue tomado preso en el castillo de Medina del Campo. Se casó con su sobrina, Francisca Pizarro. Vivió allí 21 años y fue liberado en 1561. Juan de Rada: (Navarra - Jauja 1541) Allegado a Diego de Almagro, si bien no estuvo en Cajamarca fue uno de los miembros del consejo que mandó ejecutar a Atahualpa. Acompañó a Almagro en su expedición a Chile, y luego de su muerte fue tutor de su hijo, Diego de Almagro el Mozo. Ideó el plan de asesinar a Francisco Pizarro. Falleció enfermo durante un viaje al Cuzco. Nicolás de Ribera, el viejo (Andalucía 1487 - Lima 1563). Conquistador. El apelativo de viejo respondía a su larga presencia en Lima pues llegó con Pizarro y fue vecino de la ciudad por casi 30 años. Si bien fue hombre de confianza de Francisco Pizarro, Nicolás de Ribera no estuvo en los sucesos de Cajamarca. Llegó al Perú recién en 1533 junto a Diego de Almagro. Fue el primer Alcalde de la ciudad de Lima (1535) y repitió el cargo en 1544, 1546, 1549 y 1554. Murió en 1563. Juan de Santa Cruz Pachacuti. Cronista. Hacia 1613 escribió su Relación de Antigüedades de este reino del Perú, crónica que narra la historia de los incas hasta la conquista. Lo que diferencia a Pachacuti de otros cronistas es su mentalidad. Si bien es un hombre andino cristianizado, su narración mantiene las estructuras lingüísticas quechuas. Inclusive los pocos dibujos que posee esta crónica muestran la forma andina "geométrica" no figurativa de concebir al mundo. No existe mayor registro de su vida. Francisco de Toledo (Oropesa 1515 - Escalona 1582). Virrey del Perú. Nombrado virrey del Perú en 1568 llegó a tierras peruleras el 26 de noviembre de 1569. La obra de Toledo en el Perú marcó el inicio definitivo del virreinato del Perú, que tras las guerras de los conquistadores, encomenderos y de los incas de Vilcabamba se encontraba convulsionado. Entre muchas de sus obras destacan la implantación de las visitas, la uniformización del tributo indígena y la división de la república de indios y de españoles. Concluyó su gobierno en 1581 y de inmediato se regresó a España. Murió en 1582. Tupac Amaru I (Vilcabamba 1544 - Cuzco 1572) Inca de Vilcabamba. Cuarto inca de la resistencia de Vilcabamba y hermano de Sayri Tupac y Titu Cusi Yupanqui. El virrey Toledo no confiaba en las promesas de Tupac Amaru de no levantarse en armas contra la administración española pues nunca aceptaba las invitaciones para que dejara Vilcabamba. Para acabar con la zozobra el virrey optó por declararle la guerra y fue comisiono a un numeroso ejercito para que vaya en busca del inca. Tupac Amaru I es apresado el 20 de junio de 1572 y ejecutado en la plaza de Armas del Cuzco. Cristóbal Vaca de Castro: (Izagre 1492 - 1566) Licenciado, mandado al Virreinato del Perú por Carlos V a debelar las luchas entre Pizarro y Almagro. Fue miembro del tribunal de apelaciones de la Real Cancillería de Valladolid. Ante la muerte de Pizarro, fue nombrado Gobernador del Perú. Venció a Almagro el Mozo en la batalla de Chupas el 16 de setiembre de 1542. Con el territorio pacificado hizo obras públicas. Fue apresado por el virrey Núñez Vela. Vicente de Valverde: (Segovia 1490 - Puná 1541) Dominico, capellán del ejército de Pizarro en sus expediciones al Perú. Fue el que se entrevistó con Atahualpa en Cajamarca en noviembre de 1532, donde le entregó una Biblia, cosa que el Inca rechazó. En 1534 regresó a España y en 1537 fue nombrado Obispo del Cuzco. En 1541 huyó del Perú hacia el norte en medio de las guerras civiles. Fue capturado y asesinado por indígenas en la isla de la Puná el 31 de octubre de 1541. |
sábado, 22 de agosto de 2009
COMO MEDIR EL NUMERO Material NecesarioUna tira de papel, una regla, un objeto cilíndrico, por ejemplo, una lata de refresco. Método
ExplicaciónLa relación entre la longitud de una circunferencia de radio r (2
| ||||||||||||||||||||||||||||||
| Compra experimentos construidos y listos para usar | ||||||||||||||||||||||||||||||
| Más Experimentos | ||||||||||||||||||||||||||||||

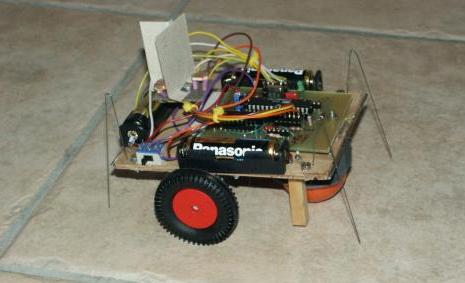
Construyendo un robot autónomo que busca la luz![[Illustration]](http://www.linuxfocus.org/common/images/article297/robot.jpg) Resumen: En este artículo describimos cómo construir un robot autónomo con un microcontrolador que siempre intentará dirigirse hacia el punto de mayor luminosidad. |
Introducción
Hace dos años presentamos en LinuxFocus al "Linux-controlled walking robot" o Robot que camina controlado con Linux. Era muy especial en su diseño ya que caminaba sobre patas y no presentaba motores convencionales. Este era un aspecto muy interesante de este robot, aunque era muy lento, necesitaba mucha energía y requería de muchas partes especiales y habilidades para construirlo.El diseño de nuestro nuevo robot es muy diferente. Es económico y podrás construirlo utilizando partes que se encuentran disponibles en prácticamente cualquier parte del mundo. Se trata de un robot autónomo controlado por un microcontrolador AVR. Como robot autónomo (no controlado por una persona) lo programamos para que corriera hacia el lugar de mayor luminosidad en la habitación.
La mecánica
![[conrad motor]](http://www.linuxfocus.org/common/images/article297/297_conrad.jpg) El pequeño motor con caja de cambios del Conrad |
![[servo motor]](http://www.linuxfocus.org/common/images/article297/297_servo.jpg) Un servo estándar modificado para funcionar como un motor. Probablemente sea la mejor solución pero se nos ocurrió esta idea cuando el robot ya estaba construido. |
Es obvio que un robot autónomo también pueda funcionar con baterías. Como el microcontrolador utiliza 4.5V los motores también deben funcionar con 3-4.5V. Además no deben consumir demasiada energía ya que de otro modo las baterías y el circuito de control serán muy grandes y pesados. Para este diseño utilizamos un chip de motor integrado llamado L293D. El chip de motor integrado L293D puede alcanzar un máximo de 0.5A. Por lo tanto los motores deberían requerir menos de 0.5A en las peores condiciones.
Utilizamos 2 pequeños motores con caja de cambios del Conrad (www.conrad.de, código de pieza: 242802) pero tú puedes utilizar cualquier otro motor pequeño con caja de cambios. De hecho pensamos ahora que la mejor solución sería utilizar Motores Servo estándar como los que se usan para los controles remoto de pequeñas lanchas, autos o aviones. Normalmente estos Motores Servo pueden girar únicamente a un cierto ángulo pero tú puedes abrir la caja de cambios del Servo, quitar el quitar el tapón, retirar el medidor de potencia y la electrónica. Es un perfecto pequeño pero fuerte motor y los Servos son fáciles de conseguir.
![[motor on wooden board 1]](http://www.linuxfocus.org/common/images/article297/297_mecanics1.jpg)
Para construir el robot coloca los motores debajo de una pequeña tablita de madera (12cm x 9cm) y ubícalos casi en el medio de modo que la mayor parte de la carga se encuentre sobre los dos ejes. La tercera rueda, la pelotita de ping pong, debe tomar solamente una pequeña fracción del peso del robot para asegurarnos de que pueda deslizarse bien en su "cojinete" (ver esquemas).
![[motor on wooden board 1]](http://www.linuxfocus.org/common/images/article297/297_mecanics2.jpg)
El cojinete para la pelotita de ping pong es la tapita de una pequeña botella de plástico que tiene exactamente el tamaño correcto.
![[pill box]](http://www.linuxfocus.org/common/images/article297/297_mecanics3.jpg)
Para operar el pequeño robot hemos utilizado 3 baterías AAA. Ubica los soportes de las baterías como se indica abajo. Las baterías son bastante pesadas así que procura que la mayor parte de la carga se halle sobre las ruedas y solamente una pequeña porción sobre la pelotita de ping pong. Puedes colocar un interruptor para seleccionar on/off (encendido/apagado)en algún lugar de lado del robot.
![[position of the batteries]](http://www.linuxfocus.org/common/images/article297/batteries.gif)
Sensores
Le daremos a nuestro robot 2 tipos de sensores:- sensores al tacto: de este modo el robot sabe si ha tocado un objeto
- sensores a la luz: para que el robot encuentre el punto más luminoso de la habitación
![[steel wire]](http://www.linuxfocus.org/common/images/article297/steelwire.jpg)
Hay 4 sensores al tacto colocados con un tornillo en las esquinas de la tablita de madera.
Cuando el robot toca un objeto el alambre de acero (2, ver la figura a continuación) toca el segundo alambre de la tablita (3) y esto cierra la conexión eléctrica entre el alambre de acero y el alambre en la tablita de madera.
Para prevenir que el alambre de acero no se salga cuando la pelotita de ping pong no esté en su cojinete hemos agregado una pequeña pieza de madera (1) debajo de la tablita. Este pequeño poste debe ubicarse a aproximadamente 5mm. por arriba del suelo cuando la pelotita de ping pong se encuentre en su cojinete.
El alambre de acero debería terminar a aproximadamente 5-7mm. por encima del suelo.
![[touch sensors]](http://www.linuxfocus.org/common/images/article297/touchsensor.jpg)
Los sensores a la luz son 3 foto reóstatos. Colocamos cartón entre los foto reóstatos como se muestra en la figura de abajo. Este cartón crea sombras en los reóstatos cuando reciben luz de un lado. Sólo cuando la luz llegue exactamente desde arriba se recibirá una cantidad de luz similar en los 3 sensores. Comparando los valores de los 3 sensores el robot puede decidir en qué dirección irá.
Puedes soldar los 3 foto resistores en una pequeña tabla de experimentación (esas tablas con muchos agujeritos) y fijar todo con un simple tornillo en el robot.
![[photo sensors]](http://www.linuxfocus.org/common/images/article297/lightsensors.jpg) | ![[position of the photo sensors]](http://www.linuxfocus.org/common/images/article297/sensors.gif) |
Más abajo te explicamos cómo conectar los sensores y los dos motores a la tabla de circuito impreso con el microcontrolador. Ahora que ya tenemos las partes mecánicas pasemos a observar el "cerebro" del robot.
El Circuito
Utilizamos un microcontrolador AT90S4433 como el "cerebro" de nuestro robot pero el "cerebro" no puede directamente liberar energía suficiente para conducir los motores. Aquí es donde participa el chip de motor integrado L293D. Este chip contiene 4 dispositivos amplificadores de salida digitales con diodos de extra protección para evitar altos voltajes inducidos por las bobinas de un motor. 2 de los dispositivos de salida se pueden usar para conducir un motor. De esta forma es posible hacer que el motor gire a la izquierda o a la derecha.
Colocamos un motor entre salida (output) 1 y salida 2 y el otro entre las salidas 3 y 4. Los pines activados del chip pueden usarse para controlar la velocidad de los motores cuando transmitimos pulsos de longitud variable a los pines activados.
El resto del circuito es muy simple: Utilizamos el microcontrolador Atmel AT90S4433 nuevamente. Tú conoces ya este microcontrolador por artículos anteriores en LinuxFocus. Sus entradas análogas se pueden utilizar para medir la luz en los foto resistores y sensores al tacto conectados directamente a las líneas digitales de entrada, como se muestra abajo.
Para mayor información sobre el microcontrolador puedes ver el artículo de Guido de la edición de marzo 2002: Programando el Microcontrolador AVR con GCC.
El circuito funciona con 4.5V. Tres baterías AAA son por lo tanto suficientes para operar el robot.
Ahora el circuito para nuestro robot autónomo estaría listo. Sin embargo, ¿qué harías si el robot no funcionara como esperabas porque algo está mal con el software? No puedes ver nada. No sabes cúales son los valores de los sensores a la luz, no sabes porqué el software del robot ha tomado tal o cual decisión. Lo que necesitamos es algún tipo de salida (output) en la pantalla que nos permita mostrar y entender qué hace el robot. El puerto serial RS232 es muy útil para este propósito. Podemos imprimir los valores de las variables y hasta podemos comunicarnos con el robot. No deseamos conectarlo todo el tiempo pero lo necesitamos para depurar al robot. Por esto tiene sentido colocar el max232 y otras piezas necesarias para la conexión RS232 en una tabla aparte y conectarla, solamente cuando sea necesario:
Los diagramas de circuito Eagle y los diseños de tablero se pueden descargar al final del artículo junto con el software para este robot. No describimos el diseño de tablero aquí. Puedes verlo en Eagle. El tablero de circuito es lo suficientemente pequeño como para fijarlo entre las baterías.
Abajo hay un dibujo donde podrás ver qué sensores al tacto en los lados del robot se conectan a qué pines en el diagrama de circuito. El diagrama también muestra cómo conectar los motores. La polaridad de los motores se elige de modo tal que el robot avance (en la dirección de la flecha) si +3V se encontrara conectado al pin "+"- y GND al pin "-"-. 1y a 4y son los nombres de los pines en el L293D.
![[]](http://www.linuxfocus.org/common/images/article297/robot_connectors.gif)
El Software
No queremos dar más detalles aquí. El programa principal se puede encontrar en el archivo linuxrobot.c (descarga del software al final del artículo). El programa incluye muchos comentarios y debería ser de fácil lectura para un programador C. El ciclo principal revisa los valores análogos de los foto resistores al ejecutar el análogo interno del Microcontrolador al convertidor digital en el modo de conversión single shot 3 veces. Luego de ello los sensores al tacto son revisados. Si se presionara cualquiera de estos sensores al tacto entonces, tienen preferencia con respecto a los sensores a la luz ya que probablemente tocarán algún obstáculo. El robot conducirá al motor unos milisegundos en la posición opuesta al sensor al tacto que fuera tocado. Si no se hubiese tocado ningún sensor al tacto entonces se compara a los foto resistores entre sí. Esta comparación se realiza con la función (comparar con) compare_with_tol() donde comparamos un valor promedio de 2. Para evitar eso de encontrarnos muy afectados por el "ruido" decimos que 2 valores se igualan si la diferencia fuera menor al 5%.Basados en la comparación de los sensores a la luz podemos decidir qué motor encenderemos. Como tenemos solamente 2 ruedas podemos dirigir el robot hacia el punto aumentando la velocidad de una de las ruedas o aún llevándolas hacia la dirección opuesta. Dado que el microcontrolador repite la medición muy rápidamente varias veces por segundo el movimiento del robot se ve como si continuara aún si detenemos uno de los motores durante la fracción de un segundo para girar un poco hacia la izquierda o hacia la derecha.
Juntando todo
Cuando ensamblas la electrónica siempre resulta una buena idea hacer controles por etapas. De esta manera podrás reducir fácilmente posibles fallas.Existen 3 programas de prueba diferentes incluidos en el paquete de software de linuxrobot (descargarlo al final del artículo). El programa ledtest permite que los 2 leds (diodos emisores de luz) parpadeen. Lo cargas con el comando "make ledtestload" (hacer que cargue ledtest). Esto compilará el programa y lo cargará en el microcontrolador. Los 2 leds deberían comenzar a parpadear inmediatamente después de que el programa se haya cargado. Cuando esta prueba resulta exitosa puedes estar seguro de que el microcontrolador con su oscilador y la conexión a la PC para cargar el software funcionan bien.
Sigue el programa motortest (motortest program). Este programa implementa "an electronic rubber ball" (una pelotita de goma electrónica). Lo cargas con el comando "make motortestload" (hacer que cargue motortest). El programa motortest controla los sensores al tacto todo el tiempo y si se toca a uno de ellos entonces el robot se aleja del sensor que fue tocado. Si tocas al robot con tu mano en uno de sus lados saltará hacia atrás. Coloca tu otra mano detrás del robot y saltará hacia atrás y hacia adelante entre tus 2 manos como una pelotita de goma. Si el robot pasa esta prueba entonces todo menos los sensores a la luz y la conexión RS232 habrán sido puestos a prueba.
El último programa de prueba se llama adctest (compilar y cargar con hacer cargar adctest (make adctestload). El programa pone a prueba a la conexión RS232 cuya función es depurar al robot y controla el ADC (analógico al convertidor digital) con 3 foto reóstatos. Carga el programa en el microcontrolador y luego conecta el adaptador para la conexión RS232 a tu PC. Después de eso ejecuta los 3 comandos siguientes en una shell:
make ttydevinitEl robot periódicamente debería imprimir los valores de la intensidad de la luz que ha medido con los sensores a la luz.
./ttydevinit /dev/ttyS0
cat /dev/ttyS0
Una vez pasadas todas las pruebas puedes cargar el programa final en el robot con "make load" (hacer cargar). El mejor lugar para jugar con las primeras pruebas es una habitación con una simple lámpara en el medio. El robot debería simplemente correr directo en la dirección de la lámpara y detenerse allí.
Es bastante divertido ver cómo se da vuelta si lo colocas sobre el piso de espalda a la fuente de luz o cómo evita las sombras.
Problemas y mejoras
Comenzamos este robot como un pequeño experimento. Resultaba divertido construir un robot autónomo que pudiera tomar decisiones por sí mismo y que no necesite ninguna conexión de datos a la computadora. El programa que incluye el paquete linuxrobot que tú puedes descargar más adelante hacia el final del artículo es pequeño y simple pero hace lo que queríamos: El robot se dirige hacia el punto de mayor luminosidad.Nos gustaría mencionar algunas cosas que podrían tenerse en cuenta como punto de partida para un futuro desarrollo:
- Los sensores al tacto se prueban únicamente en intervalos bastante extensos, unos pocos milisegundos, lo que limita la respuesta del robot. Deberían controlarse más seguido.
- Si se tocara a uno de los sensores al tacto esto tendría prioridad sobre todas las demás cosas y el robot se mueve entonces durante unos pocos cientos de milisegundos en la dirección opuesta. Si se tocara un sensor diferente durante este lapso esto sería ignorado por el momento.
- La sensibilidad de los foto resistores disminuye cuando las condiciones de luz son deficientes. Esto puede provocar el efecto de que la diferencia medida entre los sensores se encuentre por debajo del umbral que se encuentra codificado en el disco dentro del programa (5%) y el robot asume que todos los sensores reciben la misma cantidad de luz. Los valores de luminosidad que salen del ADC podrían ajustarse mediante una curva de filtro no lineal para compensar este efecto.
Lo bueno de este robot es que el hardware es de algún modo genérico: Consiste básicamente en 2 motores y algunos sensores unidos a un microcontrolador. Toda la lógica se implementa en el software. Esto significa que si cambias el software puedes cambiar practicamente todo como a tí te guste.
Aquí se ve al robot en posición de prueba. Pusimos un poco de papel Post-It debajo de él para que no saliera corriendo. El RS232 se conecta con fines de depuración:
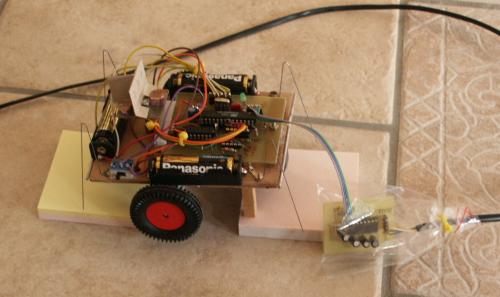
... y el robot terminado buscando la luz....:
Referencias
- LinuxFocus Marzo 2002 artículo 231: Programando el Microcontrolador AVR con GCC (Programming the AVR Microcontroller with GCC)
- linuxrobot-0.1.tar.gz: el software y los esquemas en formato eagle
- descargar página para este artículo: Hoja de datos para el L293D y posibles actualizaciones del software linuxrobot pueden encontrarse aquí.
Formulario de "talkback" para este artículo
Cada artículo tiene su propia página de "talkback". A través de esa página puedes enviar un comentario o consultar los comentarios de otros lectores >
> 
El aparato se hace funcionar colocando la botella de leyden en el borde de una mesa, lugo debes hacer que el cepillo de colección toque al tubo de pvc mientras lo haces deslizar frotando en el paño o tela. El alambre que se ve que sale de la botella de leyden es simplemente una conexión a tierra, en vez de esto puedes pedir a alguien que tome el frasco sujetando por la parte que tiene la lámina de aluminio. Esta persona no recibirá una descarga si no toca la lámina y el tornillo.

Deseas los planos completos con fotos incluidas? Por solo $us2.- lo puedes hacer.
Preguntas a: Miguel Vargas via compras@cienciafacil.com
DESEAS COMPRAR ESTE APARATO COMPLETAMENTE ARMADO Y FUNCIONANDO? POR TAN SOLO $us25.- ES TUYO. COMPRENDE PLANOS, EXPLICACIÓN E INFORME COMPLETO Y LISTO PARA PRESENTAR AL DOCENTE.
Como construir un robot araña.
Escrito por KAYK el 06/12/2006
INTRODUCCIÓN:
Por inquietud de un amigo me propuse realizar un robot, ya que comencé a interesarme por el mundo de los microcontroladores de microchip, y viendo el gran rendimiento y versatilidad, vi posible este proyecto. Para comenzar adquirí un poco de material y comencé el diseño de la parte electrónica y posteriormente de la mecánica, la cual me llevó un par de días en decidir como funcionaria mejor y que elementos definitivos tendría que usar, al principio pensé en usar motores DC, para que así en vez de patas tenga ruedas (que en realidad hubiese sido mucho mas fácil) pero bueno, me complique la vida queriendo usar servomotores de los que se usan en aeromodelismo/automodelismo por lo cual tuve que investigar como funcionan. Al cabo de un tiempo encontré información muy útil que me dio muchas ideas no solo para este robot si no para otro tipo de aplicaciones. Cabe mencionar que como el estilo araña seria su forma final, tuve que nada menos que capturar una araña y grabar con una cámara su movimiento y así poder llevar ese movimiento a los 3 servomotores que utilice (cada servomotor mueve 2 patas, ósea 6 patas en total).
POR QUE USAMOS SERVOMOTORES:
Una de las ventaja de los servomotores es su fuerza y que si se le esta entregando señal adecuada quedan en una posición fija, y si tratas de moverlo el servo hace fuerza contraria para mantener su posición en que se dejo (gran ventaja en comparación a los motores DC y Paso a Paso.) la única desventaja es que originalmente solo trabajan de 0° a 180° pero se pueden modificar fácilmente para que giren 360º y así se pueden utilizar como motores y se les puede controlar la velocidad y el sentido de giro.
LISTA DE COMPONENTES NECESARIOS:
3 – Resostatos de 1k. 4 – Resistencias de 10k. 3 – Resistencias de 1k. 3 – Resistencias de 220 ohmios. 1 – Regulador de voltaje 78m05. 1 – Cristal de 4mhz. 1 – PIC 16f84a (microcontrolador 84). 1 – Integrado lm324n. 3 – Leds. 3 – Fotoceldas. 3 – Servos FT-S148 o cualquier otro de marca FUTABA con un torque de unos 3Kg. 4 – Pilas AA. 1 – Pila de 9V. 2 – Capasitores Ceramicos 33pf (33 pico faladios). 1 – Capacitor Ceramico de 104f (104 faladios).
CONSTRUCCIÓN DEL CHASIS Y LAS PATAS:
Si alguien se anima puede mejorarlo, no solo construirlo igual a este. Para comenzar iré explicando por la parte mecánica para dar lugar más tarde a la parte electrónica analógica y digital. Lo primero de todo son las herramientas necesarias para la construcción del chasis y un instrumento para medir en el caso de la electrónica, algunos de ellos se muestran en la siguiente foto:

Para la base del robot utilice un tubo de PVC estirado, obviamente un terciado delgado serviría también u otro tipo de plástico no tan grueso, para así no añadir demasiado peso adicional. Corte un pedazo de PVC en forma de rectángulo de 15cm su lado mayor y el menor de 9cm y puse los servos de tal forma que sus ejes de movimiento estuvieran en linea recta y en la mitad del rectángulo como se muestra en la foto de más abajo, además de los orificios que se marcan y distribuyen cuando estos están listos para ser montados, el detalle de los orificios no esta detallado ya que tienen que posicionarlos de manera uniforme en el rectángulo para mantener un equilibrio y estabilidad a futuro (mas adelante verán como son posicionados dentro de este rectángulo).

Como se puede apreciar solo hay dos orificios para los servomotores, esto se debe a que uno de los servos tiene que ir en forma horizontal como lo veremos mas adelante. También hay unos cachos de plástico que soportaran el servo a una altura adecuada de la placa para que todos queden al mismo nivel cuando estén montados, estos son un rectángulo de 2cm por 1cm y como se ve en la figura son 4, además de 8 tornillos con dos tuercas por tornillo que nos fijaran dos de los servos, el tercero se fijara con un amarra cable ya que es mas practico por su posición en horizontal. Los tornillos son de 1.5mm por 1 pulgada. A continuación mostraremos el servo con su cabezal redondo y el alambre que nos servirá de patas para la primera parte, lo podéis ver en la siguiente foto:

Como podéis ver tenemos un trozo de alambre de unos 25 cm de largo por 1.5mm cuadrado de sección, por cada servo se necesitan 3 tiras de esa misma medida ya que por firmeza tuve que agregarle esa cantidad ya que por el peso de este cuando esta terminado no era capaz de mantener rígidas las patas. El cabezal del servo tiene tres orificios por cada 90° y cada alambre se inserta de la manera mostrada en la siguiente foto:

Como podéis ver en la foto ya esta ensamblado en uno de los 3 orificios falta que pase por el segundo y curvar el alambre para que tenga nuestra forma deseada:

Aunque no se ve muy bien debo mencionar que el alambre pasa por los dos orificios y sale por la parte delantera del cabezal. En la siguiente foto ya se ve terminado con sus tres alambres por cabezal y envueltos con hincha aisladora para darle rigidez.

En la siguiente foto ya esta montado en el eje con una de sus dos patas terminadas, así deben quedar dos de los 3 servomotores:

El 3° servo los alambres y posición de estos deben quedar como se muestra en la siguiente foto:

Si se fijan bien en la foto de arriba este es el servo que ira en la parte del medio y sus alambres están en otra dirección, este servo es el que se encarga de inclinar todo el cuerpo de la araña mientras los otros dos hacen que se desplace. Sin este servo no existe movimiento alguno ya que para poder avanzar hay que inclinar el peso hacia un lado para mantener el equilibrio y así poder alanzar con el otro pie, en este caso pasa algo similar, necesito inclinar el eje de equilibrio para que los dos servos restantes puedan hacer que la base completa se desplace. Como se ve en la siguiente foto ya tenemos los tres servos con sus respectivas cabezas y patas terminadas lista para ser montadas al final del proyecto cuando todo este en su sitio:

COMENZAMOS EL MONTAJE:
En la siguiente foto se puede ver el primer servo en su sitio con sus tornillos y soportes de plástico pequeños, fíjense que el eje de giro se encuentra en la mitad de la base marcado con una línea:

En la siguiente foto tenemos ya montado el segundo servo, que se monta de forma igual al anterior:

En la siguiente foto se ve la parte superior en donde esta anclado el servo con sus tuercas que mantendrán el servo en su posición:
: 
En la siguiente foto se puede ver el 3º servo que va en forma horizontal con sus amarra cable como sujeción:

En la siguiente foto se observa con mas detalle el posicionamiento de los servos, observe que el servo que tiene el número 1 su cable de control ha sido pasado por el orificio que esta a un costado:

Aquí es importante que tengan cada servo enumerado como se puede ver en la foto de arriba, en una esquina el servo 0 en la otra el 2 y en el medio el 1 también se debe marcar el terminal de conexión del servo con el numero que corresponda, ya que esto nos servirá para entender su conexionado posterior y para el que entienda de programación sepa en el programa de movimiento que servo es el que se debe mover.
LA ALIMENTACIÓN ELÉCTRICA:
Para mover los servos usaremos 4 pilas AA de 1,5V. cada una y para la parte electrónica analógica y digital una pila de 9V. que limitaremos a 5V. con un regulador de voltaje.

Y no olvidéis comprar también un porta-pilas para 4 pilas AA y un conector para la pila de 9V, como veis en al foto superior, así podremos posicionar dichos elementos más fácilmente en nuestro robot, para sujetar la placa que contendrá el circuito yo usaré 2 gomas elásticas como podéis ver en la foto:

EL CIRCUITO:
Como podéis ver más abajo está el esquema electrónico que se encarga de verificar la fuente de luz, que en este caso usamos 3 sensores de luz para direcionar entre Izquierda, Centro y Derecha, y que son llevados al microcontrolador (16F84A) que se encargará de procesar y enviar las ordenes a los servomotores para poder hacer lo que se pretende, que es mover la araña en el sentido de la fuente de luz.
DIBUJO DEL CIRCUITO AQUÍ (Pulsa aquí para verlo)
En el dibujo de arriba esta detallada cada sección de todo el conjunto, la parte Analógica que se encarga de enviar la señal al microcontrolador (Control digital) su fuente de alimentación y regulación y finalmente la parte de potencia que son los servomotores. Voy a explicar cada una de ellas para que entiendan como funciona cada parte del circuito. Comenzando con la parte analógica vemos en el costado izquierdo superior que tenemos 3 LDR’s que nos darán la posición de la fuente de luz, y son puestos en un circuito integrado que esta configurado como comprobador de voltaje y que para un LDR entendemos que: Al aplicarle luz a la foto resistencia su valor disminuye ingresando por la entrada negativa del operacional un valor que se compara por el de la resistencia variable de 1k ohm cuando este valor es igual a la salida del operacional tenemos un alto (3,3V. aproximadamente) y cuando no existe luz este valor de voltaje es diferente por el cual la salida de ese operacional es de 0 Voltios. A la salida de cada operacional se conecta diodos LED que se encargan de avisarnos el estado de las entradas y así poder verificar y ajustar con las resistencias variables de 1k ohm el valor de luz o mejor dicho la sensibilidad a la luz que queremos que funcione nuestro robot, si se encuentra encendido algún led es por que esta llegando luz de alguna fuente del ambiente, para dejarlo apagado solo se tiene que ajustar la resistencia de 1k ohm hasta que se apague. Debo mencionar que estos indicadores deben estar apagados en un comienzo para así al aplicarles luz comience a funcionar el robot según la dirección del rayo de luz. Aquí podemos sacar en conclusión que para los 3 LDR’s tenemos 8 posibles combinaciones que nos darán los diferentes estados que serán procesados por el microcrontolador, esta tabla se muestra en la siguiente imagen:

Ya sabemos que el 0 corresponde a un 0 lógico y los 3,3V. a un 1 lógico por lo que tenemos una tabla con todas las posibles combinaciones y su respectivo movimiento que llevara a cabo finalmente. En la parte de control Digital se toman estos valores y según nuestra tabla, se le enviaran las señales al servo que corresponda para hacer un movimiento en particular, y para entender que tipo de señal se le debe enviar, detallare a continuación como funciona un servomotor:

Como se muestra en la figura y como mencioné anteriormente el servo tiene una movilidad de 180° y funciona con lo que se conoce como modulación por ancho de pulsos o PWM. Osea este servo que es dE la marca FUTABA de Radiocontrol, funciona a 50Hz, o sea en un segundo le son enviados 50 pulsos, y con un simple calculo se puede dividir 1/50 y nos dará 20miliseg el ancho de pulso se utilizara para el trabajo del movimiento de este: Osea trabajando en este pequeño intervalo, podemos poner en un ángulo a nuestro antojo el servomotor y que se quede allí hasta que cambiemos ese pulso por otro. Para 0° tenemos que tener un pulso de 0,2 mili segundos y el resto un pulso bajo hasta los 20 milisegundos, esto repetidamente 50 veces nos da los 50 Hz y por consecuencia el servo en la posición 0° como se muestra en la figura. Para 90° tenemos que aplicar un pulso de 1,5 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 90°, también mostrado en la figura. Y para 180 ° tenemos que aplicar un pulso de 2,2 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 180°. Para este caso en particular se uso como centro 90° y se calcularon matemáticamente los pulsos para 66,5° y 112,5° que serán los 3 ángulos usados para que camine nuestra araña.
En el programa en ASM se detallan los tiempos de estos pulsos como asi las rutinas usadas para el movimiento podéis verlos en este documento de texto:
Debo mencionar que para aumentar la rapidez entre servo y servo en vez de repetir 50 veces el movimiento por servo lo disminuí a 8 y para centrarlo a 13 veces. No pretendo explicar el programa ya que seria muy largo, pero bien resumido el programa analiza los niveles lógicos de los sensores LDR que son 8 para así ejecutar una rutina de movimiento X y así poder llevar los 3 servos en una dirección X, este movimiento esta comprobado y posteriormente será puesto un video con su desempeño.

Aquí mostramos el ensamble de la parte analógica en un protoboard y que usa el circuito integrado para llevar la información de los LDR a niveles lógicos que el microcontrolador procesara a futuro, también están las LDR los Diodos LED que indicaran cuando se este alumbrando cada LDR.

Aquí se encuentra ensamblado el circuito digital de proceso con su microcontrolador y sus accesorios como la pequeña regleta de conexionado donde irán los servos conectados, y la fuente regulada que se encarga de pasar los 9 volt a los 5 volt de trabajo del Microcontrolador y que también será usado para la parte analógica ![]()

Aquí ya esta ensamblado los dos protoboard y unidas las señales de control como las fuentes tal como salían en el esquema del circuito. solo queda ponerlo sobre la base y conectar los servos como se muestra en la siguiente Figura. Un de talle importante es que la parte que tiene los sensores (LDR), debe ir sobre el servo con la numeración 0.

Aquí ya esta ensamblado casi por completo el circuito.

Solo nos queda colocar en su posición cada pata de nuestra araña (Ver siguiente Figura.).

Y ya estamos listos ![]()


Ya esta terminada nuestra araña solo queda programar el Microcontrolador con un programador para PIC y ver si responde a nuestro mandato de luz.
Espero la disfruten! Aquí tenéis un vídeo en el que se puede ver como reacciona a la luz:
Mostrando la parte analógica en funcionamiento.
ACTUALIZACIÓN:
Mejorando algunas rutinas, perfeccionando el movimiento y acelerando el tiempo de movilidad entre servo y servo, logre un mejor desempeño en cuanto a su movilidad. Con este nuevo programa mi robot quedo mas ágil y gira con mayor facilidad, aquí lo tenéis:
Y aquí un vídeo de la araña con el nuevo programa:
El costo total de este “bicho” ha sido de unos 65 Euros. ![]()
ACTUALIZACIÓN 01/07/2008:
Suscribirse a:
Comentarios (Atom)